… und sie dann für einen Roboter oder eine Bearbeitungsmaschine nutzen.
Sie benötigen die Sequenz eines CNC- oder eines Roboter-Programms, die ‚diese‘ Kurve abfährt. Aber …
Wie kann man eine vorgegebene Bewegung durch eine Sequenz von Linien und Kreisbögen ausdrücken, damit sie jeder Roboter oder jede CNC-Maschine nachfahren kann?
Unsere Lösung verdichtet Punktfolgen, 2D und 3D und kann sogar zwei Zusatzachsen für die Werkzeugorientierung berücksichtigen.
Wo kommen die Punktfolgen her?
Im ersten Konzept waren es die aufgezeichneten Punktfolgen eines Handgeführten Roboters. Er verfügte über einen Kraftmomentensensor und einem takilen Abstandsensor.
Es macht auch Sinn, konstruierte Kurven, etwa aus Splines in Punktfolgen auszulösen und diese dann durch eine Sequenz von Liniensegmenten und Kreisbögen zu ersetzen.
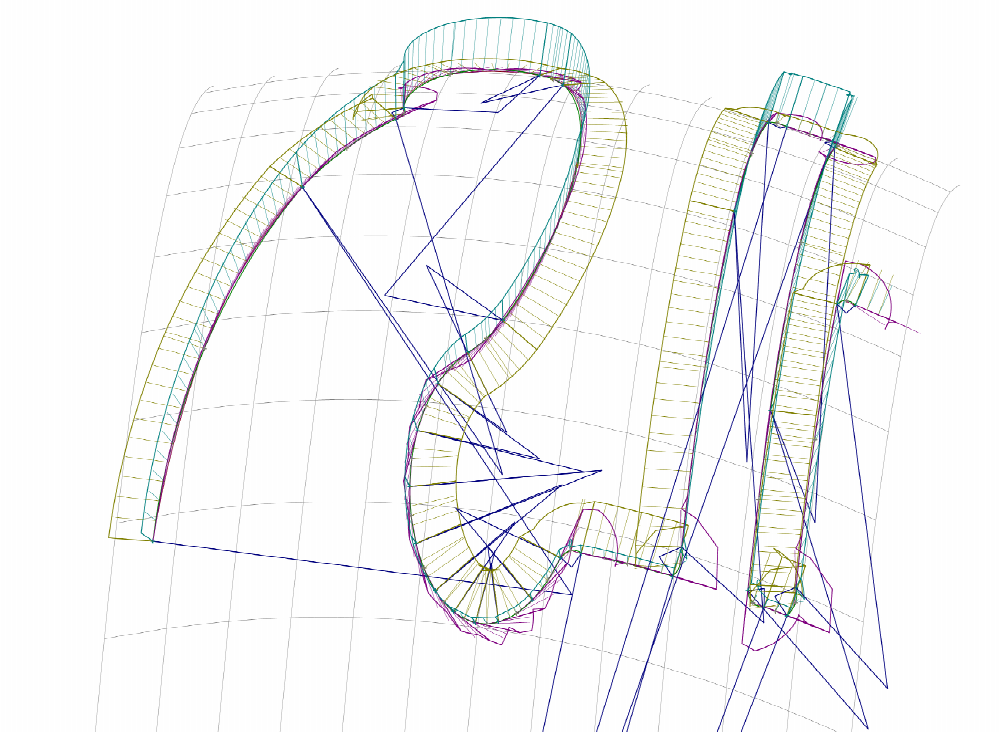
Oder eine zweidimensionale Kurve, die auf einen gewölbte Oberfläche projeziert wird und dann als räumliches Roboterprogramm bereitgestellt wird. Hierbei könnten die Orientierungsachsen dafür sorgen, dass das Bearbeitungswerkzeug senkrecht auf der Oberfläche steht.
Diese Rückführung digitalisierter Linienkonturen kann auch zur Korrektur eingesetzt werden. Modellierte Verzerrungen können etwa für einen Kraftvorhalt rechnerisch in jedem einzelnen Punkt kompensiert werden. Aus diesen korrigierten Punktfolgen erstellen wir wieder eine Bewegungssequenz aus Linien und Kreisbögen, die vom Bearbeitungsroboter interpoliert werden.
Die Umsetzung einer Testumgebung wird aktuell erarbeiet und dann auf der Seite Software-Entwicklung verlinkt.